


한화시스템이 무인(無人)잠수정 개발에 박차를 가한다.
한화시스템은 △선박해양플랜트연구소(KRISO) △한국로봇융합연구원(KIRO) △한국과학기술원(KAIST) △한국해양대 등 ‘산학연’으로 구성된 컨소시엄에 참여한다. 해양수산과학기술진흥원(KIMST)이 주관하는 ‘군집 수색 자율 무인잠수정 및 운용시스템 개발’ 사업에 착수했다.
약 250억 원 규모인 이번 사업은 2021년 6월 11일 착수 회의를 시작, 2025년까지 군집 수색 자율 무인잠수정 및 운용시스템 개발 완료를 목표로 하고 있다.
국내 해양사고 및 조난사고는 지속해서 증가하는 추세다. 사고 범위도 전 해역에 분포됐다. 특히 악천후·악시계 등으로 인해 수색조의 조기 투입이 불가능하거나 정확한 사고 위치 파악이 어려운 경우가 있다. 강한 조류로 인해 잠수사의 안전이 위협받으면 신속한 수색 및 인명 구조가 어려워진다.
이에 열악한 해양 환경에도 즉시 투입할 수 있고, 신속·정확한 수중 탐색이 가능한 해양 무인체계 구축의 필요성이 대두되고 있다.
이번 사업의 핵심은 자율 무인잠수정에 군집 제어, 정밀 탐색, 실시간 통제 기술을 적용해 수색 능력을 강화, 인명 구조의 골든타임을 사수하는 데 있다. 성공적인 개발을 위해서는 다수의 해양 무인 체계를 동시 운용할 수 있는 군집 해양 무인 체계 운용 기술, 정확한 수중 탐색을 가능하게 하는 수중 센서 및 영상 처리 기술, 실시간으로 현장 상황을 확인할 수 있는 수중·수상 협업 및 실시간 통합 관제 기술 등의 확보가 관건이다.
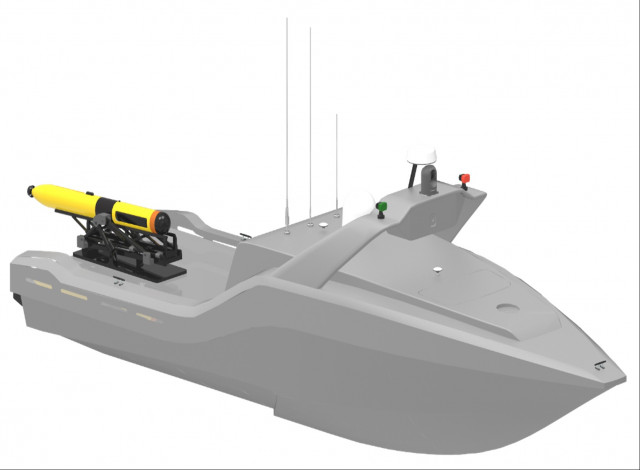
한화시스템은 이번 사업에서 자율 무인잠수정(AUV, Autonomous Underwater Vehicle)의 군집 항법·군집 제어 알고리즘과 광역·정밀 탐색이 가능한 소나(음파탐지기) 등을 개발한다. 다양한 임무 수행이 가능한 12m급 무인수상정(USV, Unmanned Surface Vehicle)과 연계해 운용 통제소와 자율 무인잠수정 간 수상·수중 영상을 실시간으로 전송하고, 무인수상정 및 무인잠수정을 제어할 수 있는 통합 관제 기술도 개발할 계획이다.
김연철 한화시스템 대표이사는 “한화시스템은 무기 체계 개발 사업으로 확보한 풍부한 실환경 검증 경험을 바탕으로 완성도 높은 기술력을 보유하고 있다”며 “시시각각 변화하는 해양 환경에 즉각적으로 대응할 수 있는 신뢰도 높은 해양 무인 체계를 개발해 효과적인 수색 구조 체계를 확보할 수 있도록 최선을 다할 것”이라고 말했다.

.jpg)

















